罗 静 四川九州电子科技股份有限公司 高级工程师
魏裕磊 四川九洲集团技术研究部 高级工程师
摘要
本文重点介绍了我公司KU波段平板缝隙天线的特点,以及我公司研制的基于运动平台的卫星自动跟踪系统的工作原理和系统组成。
关键词:平板缝隙天线、卫星自动跟踪、陀螺传感器、单片机
1 概述
随着卫星数字电视的发展和普及,固定的卫星数字电视接收系统已经不能满足人们物质文化生活的需要,人们希望在乘车、乘船时或者在外来旅游时,随时能够收看卫星数字电视节目。因此,近年来移动卫星数字电视接收系统越来越受到人们的亲赖。而平板缝隙天线以其小巧、轻便、便于携带和安装等特点,也得到更广泛的关注。
2 平板缝隙天线特点
目前,使用于固定接收卫星广播电视信号的天线大多为抛物面天线。在国内外民用天线市场上,平板缝隙天线并不多见。与其他卫星数字电视接收天线相比,平板缝隙天线有更大的优势:与同增益抛物面天线相比面积小、效率高。平板缝隙天线体积小、重量轻,对星精度要求没有抛物面天线高,而且运输、安装更简便且不易变形、锈蚀等。由于平板缝隙天线的诸多优点,因此可以取代抛物面天线作为接收卫星广播电视信号的天线。我公司的KU波段平板缝隙接收天线,接收频率范围是11.7GHz~12.75GHz,增益为30dB,驻波比:≤1.8,极化方式:垂直、水平,第一副瓣电平:≤-13 dB。
3 自动跟踪系统的工作原理和组成
天线自动跟踪系统主要由:陀螺仪,单片机,步进电机及其驱动电路,卫星信标信号处理电路组成。组成框图如图(1)所示:
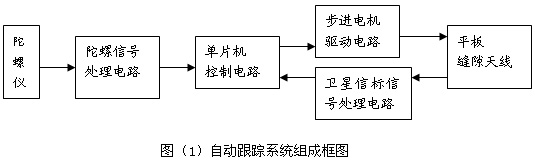
天线自动跟踪系统的工作原理:当天线高频头与卫星有偏差时,系统单片机根据卫星信标大小和陀螺仪传感器送出的关于天线方位角变化量做出相应的处理后,送出相应控制信号至步进电机驱动电路驱动步进电机来控制卫星电视天线的转动方向,使其实时对准卫星,从而实现移动接收卫星节目。
4 单元电路
本控制系统采用Microchip公司的PIC16F876单片机作为控制核心,以ST公司的L298N作步进电机的驱动电路,对天线方位的控制则是根据卫星信标的值和电子陀螺传感器的值做出判断。步进电机驱动电机如图(2)所示:

模拟量输入电路在本跟踪系统中是相当重要的一部分电路,天线是否对准卫星,系统对步进电机的控制都是通过参考该部分的值,再做出相应的控制的。该部分电路涉及器件主要有:电子陀螺传感器,卫星信标处理单元。电子陀螺传感器的作用主要是测量载体在行驶的过程中航向角的变化量,卫星信标处理单元则是要捕获卫星信标的最大值。电子陀螺传感器是以测量间接值的方式来促使天线方位的变化,而卫星信标处理单元则是测量与天线相关的卫星信标值来促使天线位置的变化。两者相互补充,能够提高系统跟踪精度。
①.陀螺传感器
陀螺传感器采用Murata 公司的ENV-05F-03。该传感器使用Coriolis准则来测量振动物体的角速率。
输出电压与角速率的关系:Vout =V0 + Sv × O[V]
V0:角速率为0时输出电压值(V)
Sv:比例因子(mV/deg/s)
O[V]:角速率(deg/s)
陀螺仪的输出值Vout为电压值,该电压值与陀螺仪的角速率的关系为:当陀螺仪顺时针方向旋转时Vout 为正,而逆时针方向旋转时 Vout 为负。由于 Vout 是模拟量,因此必须进行A/D转换,数据才能被单片机进行处理。我们可以求出某一时刻的陀螺角速率。该角速率反映的是运动汽车航向角的变化量。通过对该角速率积分就能够得到航向角的变化量。
积分公式:
Δθ=∫t2t1(ω2-ω1)t d t
其中:Δθ是航向角变化量;ω1,ω2分别是t1,t2时刻角速率。
单片机根据上式计算出航向角的变化量后,根据步进电机的实际情况再计算出需要转动多少步,使天线到达指定位置。使得整个系统在运动的过程中动态的跟踪卫星信号。
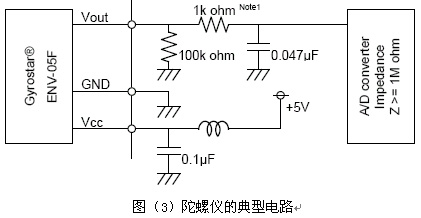
陀螺仪的典型电路如图(3)所示:
②卫星信标信号处理单元
卫星信标是由卫星发出的一种特定频率的信号,用以区分不同的卫星。卫星信标信号处理单元包括一个集成AGC(自动增益控制)模块和一个运算放大器LM258。完成对卫星信标信号的滤波、放大、检测等功能,以减小信号中的干扰成分,保证跟踪的正常进行。集成AGC模块外接天线部分的高频头,它的作用一是接收卫星节目信号,另一种功能就是接收卫星信标,并且把接收到的信号频率降低到一定的范围内。
由于信标信号的大小直接反映了场强电压的大小,从而也反映了天线波束中心与实际目标偏角的关系。当集成AGC模块接收到卫星的信标,并处理后,输出信号的电平值经运放放大后送至单片机的2管脚进行A/D转换交由单片机处理。在天线对准卫星的过程中,由于载体的运动,卫星与天线波束中心存在偏角,因此电平值是变化的。如果单片机当前接收到的电平值比前一次的值大,则由单片机控制步进电机正向旋转,使高频头对准卫星,以期得到更大的电平值。反之,当前得到的电平值比前一次的值小,则说明高频头所处的位置已经越过了出现最大值的地方,于是由单片机控制步进电机反向旋转。单片机就是据此控制步进电机的旋转方向。
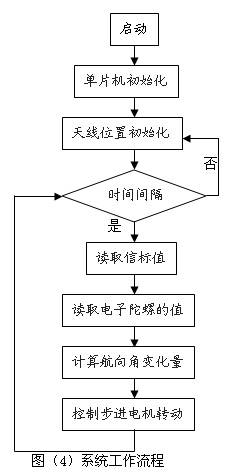
在系统启动后首次对星时,系统需要根据卫星信标值的大小来判断天线的旋转方向,使天线对准卫星。当天线对准卫星后,就交由电子陀螺来测量天线应该旋转的方向和角度大小。因为初始化阶段天线位置的确定对以后系统的工作精度影响很大,因为系统采用的电子陀螺的值是载体行驶中的航向角变化量,是一个相对值,因此只能间接的来判断天线应该旋转的角度,如果初始阶段天线没有对准卫星,陀螺测得的值也不能使天线对准卫星,因此,我们最好在接收卫星信标阶段多测量几次,如果最大值出现在同一个地方才交由电子陀螺的值来判断。另外,由于电子陀螺长期工作会产生零点漂移和随机漂移,从而影响天线跟踪的精度。因此我们必须在每隔一定的时间就必须让系统再次采集卫星信标值来校正天线的跟踪位置,修正误差使天线重新对准卫星。
系统工作流程如图(4)所示。
5 结论
该卫星自动跟踪系统通过底部的吸盘固定,安装和拆卸非常方便。将我们采用以上方案设计的卫星自动跟踪系统,安装在汽车上进行验证,当车辆运行平稳,车速不超过120km/h,卫星不被遮挡的情况下,可以稳定的接收卫星数字电视节目。
|


